Saugroboter Navigation & Sensorik: So unterscheiden sich LDS, ToF & Gyro

Bei der Entscheidung, welchen Saugroboter man kaufen sollte, ist es hilfreich, die einzelnen Navigationsmethoden und Sensoren zu kennen. Denn: Nicht jede Art der Orientierung ist empfehlenswert. Wir stellen euch alle wichtigen Sensoren und Navigationsmethoden vor.
Navigationsmethode #1
Laser-Raumvermessung via LDS
Die Lidar-Technologie (light detection and ranging), auch Ladar (laser detection and ranging), ist in der Herstellung teuer, für Kunden und Kundinnen aber absolut empfehlenswert. Auf der Oberseite eines Saugroboters wird ein Turm verbaut, welcher den Laserdistanzsensor (LDS) beinhaltet. Hierüber scannt der Haushaltshelfer die Umrisse von Räumlichkeiten.

Über den LDS auf der Oberseite scannen Saugroboter die Umrisse einer Wohnung.
Die Laser-Navigation ist eine mit dem Radar verwandte Methode zur optischen Abstands- und Geschwindigkeitsmessung. Erfunden wurde die ursprüngliche Laser-Doppler-Linien-Distanzsensorik in Deutschland.

Bezahlbare LDS-Modelle gibt es etwa seit 2016.
Nachteil an der Laser-Raumvermessung: Die Roboter sind durch den Turm zumeist 9-11 cm hoch. Somit gelangen sie unter deutlich weniger Möbelstücke als flachere Modelle ohne LDS-Turm. Mut machen hier aber Modelle wie der 360 S10, die mit einem nach oben und einem nach unten gerichteten LDS (beide an der Vorderseite) navigieren. Dies ermöglicht eine flachere Bauweise und wird in zunehmend mehr Modellen verbaut.

Links das LDS-Modell, rechts der 5 cm flache Xiaomi Ultra Slim ohne LDS-Turm auf der Oberseite
Navigationsmethode #2
Kamera-Navigation und optische Sensorik
Spricht man von Kamera-Navigation, ist keine vorne verbaute Kamera gemeint, die Live-Bilder an das Smartphone sendet (wie etwa beim Roborock S7 MaxV Ultra). Die Kamera ist zumeist nach oben gerichtet, da der Saugroboter damit die Umrisse der Decke scannt. Dies tut der Haushaltshelfer, da man von Entwicklerseite davon ausgeht, dass die Decke den gleichen Grundriss aufweist wie die Bodenfläche. Ist zumeist ja auch der Fall.

Eine richtige Kamera wie die des Trifo Lucy ist bei der Kamera-Navigation nur selten gemeint.

Bei der Kamera-Navigation wird die Decke gescannt.
Dachschrägen werden bei dieser Navigationsmethode zum Problem, zudem sind weitere Sensoren notwendig, um Hindernissen wie Möbelstücken oder Gegenständen ausweichen zu können. Weiteres Manko: Bei schlechten Lichtverhältnissen erfasst die Kamera die Deckenumrisse nicht zuverlässig. Dies kann in dunklen Räumen und selbstredend auch nachts zu Orientierungslosigkeit führen.
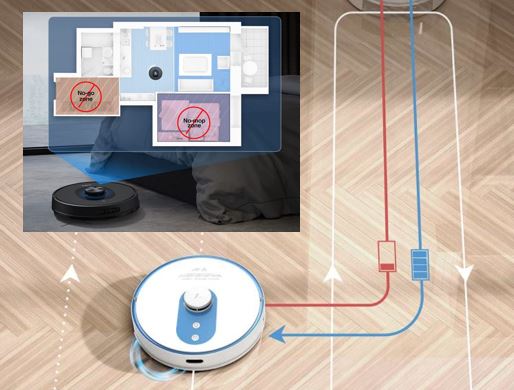
Mit optischen Sensoren wie einem dToF (distance Time of Flight) erfassen Saugroboter Türen und Durchgänge deutlich genauer und können sich in den vier Wänden noch besser orientieren. Technisch betrachtet misst der Haushaltsroboter mit dem dToF Distanzen mit einem Laufzeitverfahren (Geschwindigkeit + Entfernung). Optische Sensoren sind Geräte, die mittels Licht Gegenstände erfassen und sind nicht zu verwechseln mit Kameras.
Ein Live-Mapping, also eine Kartendarstellung der Räumlichkeiten, ist möglich, hängt aber von den zusätzlichen Sensoren ab.
Navigationsmethode #3
Chaos-Prinzip
Als die allerersten Modelle auf den Markt kamen, navigierten diese noch via Chaos-Prinzip. Was von der Namensgebung her chaotisch klingt, bedeutet in der Praxis, dass sich der Saugroboter nach dem Zufallsprinzip durch die vier Wände bewegt. Hierbei weiß er nicht, wo im Raum (erst recht nicht in welchem Raum) er sich befindet und wann alle Bereiche abgefahren sind.

Links gerade Bahnen, rechts Chaos- oder Zufallsprinzip
Sobald der Roboter eine Wand vor sich erkennt, macht er eine 45°-Drehung und fährt wieder geradeaus bis zum nächsten Hindernis. Allzu angesagt ist die Navigationsmethode in 2022 nicht mehr, da es bei Wohnflächen oberhalb von 40 m² nie gesichert ist, dass wirklich alle Bereiche gereinigt werden.

Geradeaus bis es nicht mehr weitergeht: Das Chaos-Prinzip
Navigationsmethode #4
AI- und 3D-Hinderniserkennung
Besonders in lebendigen Haushalten mit Tieren, Kindern und mehr ist die Erkennung kleiner Hindernisse sinnvoll, da Schuhe, Socken, Spielzeug oder Kabel in solchen Haushalten nicht immer an der gleichen Stelle liegen. Ob mittels AI oder 3D-Sensorik: Die Objekterkennung ist der wichtigste Schritt in der Haushaltsrobotik, die Bodenreinigung zu 100 % autonom stattfinden lassen zu können.

Je mehr Hindernisse ein Saugroboter erkennt, umso weniger müssen wir Menschen vorher aufräumen.
Einige Hersteller wie Roborock, Dreame, Xiaomi oder ECOVACS sind mit ihrer jeweiligen AI-Entwicklung bereits so weit, dass das einstige Zukunftsszenario nicht mehr allzu utopisch erscheint. Zumeist werden die Saugroboter anhand von zehntausenden auf der „Roboter-Festplatte“ eingespeisten Bildern „trainiert“. Je mehr Bilder, umso smarter langfristig.

Je kleiner ein Hindernis, umso komplizierter für den Saugroboter.
Navigationsmethode #5
Navigation via Gyrosensor
Gyrosensoren sind zumeist ergänzende Sensoren, doch werden auch nahezu alleinstehend als Hauptnavigationssensor verbaut. Hierbei misst der Saugroboter die Drehbewegungen von der Ladestation aus und versucht auf diese Weise, sich den Weg einzuprägen. Ein bisschen wie bei Hänsel und Gretel; der Roboter hofft, seine Station nach der Reinigungsfahrt wiederzufinden.

Laut dieser Grafik des Herstellers Tesvor ist Gyrosensorik nicht mehr up to date. Ist aus unserer Sicht aber nur bedingt korrekt.
Navigationsmethode #6
ToF- und Infrarotsensorik
Mit optischen Sensoren wie einem dToF-Sensoren (distance Time of Flight) erfassen Saugroboter Türen und Durchgänge deutlich genauer und können sich in den vier Wänden noch besser orientieren. Technisch betrachtet messen ToF-Sensoren Distanzen mit einem Laufzeitverfahren (Geschwindigkeit + Entfernung). Zumeist werden ToF-Sensoren modernen LDS-Robotern beigefügt.

Mit einem ToF-Sensor können seitliche Abstände besser bestimmt werden.
Infrarotsensoren dienen in erster Linie zur Signalübertragung zwischen Saugroboter und Ladestation. Da die Station auch mit Infrarot ausgestattet ist, erkennt der Roboter, wo sich diese befindet. Mit der Station als wichtigster Orientierungspunkt für einen Saugroboter, sind Infrarotsensoren in fast jedem Modell implementiert.

Damit ein Saugroboter seine Ladestation wiederfindet, ist zumeist Infrarotsensorik am Werk.
Weitere wichtige Begriffe mit Erklärung
Ergänzend zu den vorangegangen Sensoren und damit verbundenen Navigationsmethoden, gibt es noch ein paar Begrifflichkeiten, die wir euch nicht vorenthalten möchten, da diese unmittelbar mit der Navigation eines Saugroboters zusammenhängen:
- VSLAM-Grafikalgorithmus (Visual Simultaneous Localization and Mapping): Ermöglicht es Robotern, die während der Fahrt erkannten Hindernisse in einer Karte abzuspeichern. Hierbei wird simultan die Position bestimmt und dabei die Karte erstellt.
- Z-Shaped-/ZigZag-Modus: Beherrscht ein Saugroboter den Z-Shaped-Reinigungsmodus, arbeitet er in geraden Bahnen. Trifft er auf ein Hindernis, macht er um ca. 180° kehrt und fährt in gerader Bahn weiter. So wird kein Bereich ausgelassen.
- Wall-/Edge-Modus: Der Saugroboter fährt gezielt äußere Hindernisse wie Wände und außenstehende Möbel ab.
- Spot-Reinigung: Der Saugroboter dreht sich in größer werdenden Kreisen um sich selbst, sozusagen um den „Spot“, an dem er sich befindet. Dies wird häufig verwendet, wenn man in einem kleinen, aber bestimmten Bereich saugen lassen möchte.
- Zoned Cleanup: Das gezielte Reinigen eines bestimmten Bereichs innerhalb der vier Wände setzt eine App-Steuerung samt Mapping-Funktion beim Saugroboter voraus.
Fehlt euch ein Begriff? Schreibt uns in der Kommentarfunktion!
Bisherige Saugroboter-Tricks
































Wer hier schreibt
Hi zusammen! Ich bin Tim und teste seit nunmehr sechs Jahren Saugroboter, Akkusauger und zig weitere smarte Haushaltsgeräte. Mein Ziel: Euch zu zeigen, wie man mehr Freude und weniger Arbeit im Haushalt haben kann. Zu diesem Zweck gründete ich 2017 die Facebook-Gruppe „Saugroboter-Community“, in der ich euch gerne willkommen heiße.
3 Kommentare
Einen Kommentar abschicken
Das könnte dich auch interessieren…

Roborock Qrevo S Saugroboter für 619€: Überarbeiteter Qrevo mit mehr Saugkraft
UPDATEAuch nach dem Prime Day gibt es den neuen Qrevo S noch zum rabattierten Preis von 619€ bei Amazon. Aktiviert den...

Eureka NERE 10s für 299€: Saugroboter mit beutelloser Absaugstation im Test – Bestpreis
InhaltsverzeichnisTechnische DatenBeutellose AbsaugstationBedienung und App-SteuerungNavigation und...

Narwal Freo X Ultra im Test: Innovativer Saugroboter mit Reinigungsstation für 689€ – Bestpreis – Sponsored Post
Inhaltsverzeichnis Technische DatenLieferumfangErsteindruck und VerarbeitungFeatures der...
Gute Navigation, ich habe keine Lust mehr vor allem Reinigungsvorgang immer die ganze Wohnung beziehungsweise das Gebäude ab suchen auf herum liegende unfassbare Gegenstände, auf Kabel, und so weiter. Zum Beispiel kann in einem Computer Raum ein Saugroboter gar nicht arbeiten, wenn ich habe zum Teil auf dem Boden liegen. Nur mit großem Aufwand und mechanischen Hindernissen kann ich das verhindern- ich mach’s dann lieber gleich selber und verzichte auf den Roboter
Dieser Artikel strotzt einfach nur vor Fehlern und falsch verwendeten Begriffen.
Einfach mal 2 Stunden hinsetzen und sich mal Grundsätze der Roboternavigation aneignen.
Alleine die Idee, dass die Kameranavigation die Wohnungsdecke vermisst zeugt von absoluter Unkenntnis.
Hi Carsten, die Herausforderung nehme ich an. Wie funktioniert die Kamera-Navigation aus deiner Sicht? Na komm, nur meckern geht auch nicht!